

ミリ波レーダの原理
センサモデルでは、レイトレース結果を現実世界の電磁波入力と見なして、現実世界のセンサチップの内部動作をできる限り忠実に模倣し、その出力を計算します。出力とは、点群(ミリ波レーダとLiDAR)、または画像(カメラ)となります。以下では、ミリ波レーダの原理についてご紹介します。
1次元Radarの原理(距離方向)
1次元Radarの役目は、物体までの「距離」を測定することです。
その方式は、「時間」を測定するパルスレーダ方式と、「位相」を測定するFMCW方式に大別されます。現在の車載レーダは後者が主流ですが、人間の脳は「位相」というものに慣れていないことが難しく錯覚させる原因となっています。しかし、図1のように順序立てて簡略化して考えて行くと、実はその本質はとても簡単であることに気付きます。
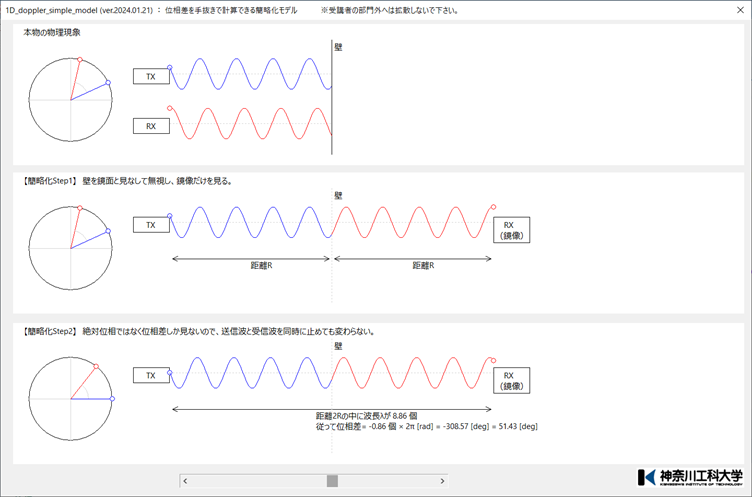
(図1)レーダの基本原理理解を目的とした簡略化図
FMCWレーダは更に、距離Rを変化させる「ドップラーレーダ」と、周波数fを変化させる「測距レーダ」の、原理が相対な2種類に分かれます。車載レーダでは、測距レーダを用います。
2次元Radarの原理
2次元Radarの役目は、物体までの「距離」に加えて、物体の「方向」も測定することです。 2次元レーダの中身は、1次元測距レーダを複数並べたものに過ぎません。その結果、見た目はアンテナが多数並び、出力されるADCデータは2次元配列になります。物体の「方向」が真正面ではなく斜めの場合は、これらアンテナ間で位相差が生じます。図3ではこの位相差を、2次元ADC配列に現れる縞模様の傾きとして表現しています。直感的に説明すると、この縞模様を2次元FFTで検出することで、物体の「方向」を推定しています。
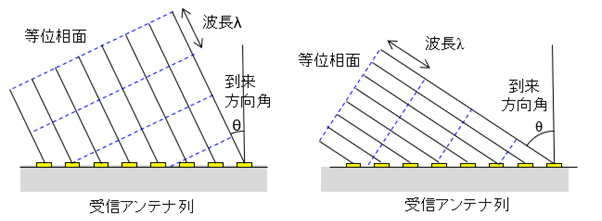
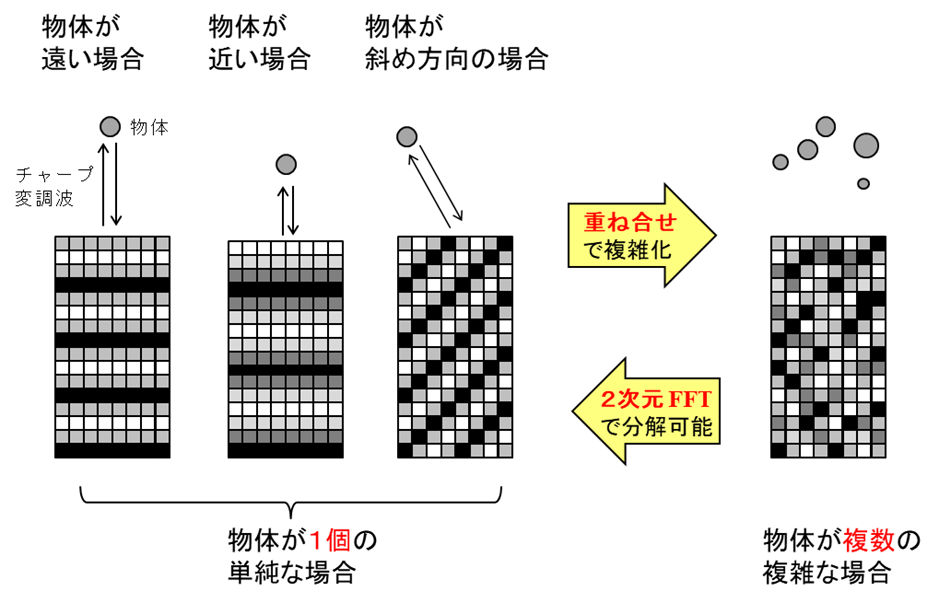
(図2)物体の方向を推定する原理
-
自動車業界に来たタイミングでちょうど高周波技術の結晶であるミリ波レーダが車に普及し始め、その波に乗ってミリ波レーダ技術者 (ハード・信号処理 ソフト) へ転身しました。
さらに2023年よりDIVPに参加し、現実世界のミリ波レーダ技術者から、仮想世界の3大センサ技術者への成長を目指しています。
この記事をシェアする
SNS
DIVP技術セミナーの詳細や今後のイベント等をSNSで投稿予定です。
カテゴリー
タグ一覧
Latest report
-
 2026 6 25
2026 6 252025年度 研究成果報告
-
2026 1 9
2024年度 研究成果報告
-
 2025 12 24
2025 12 24ADS Safety assurance Breakout Workshop 2025