
テーマ(3)センサ弱点事象の特定と事象の拡張
DIVP®プロジェクトでは、実際の現象と高度に一致した「運転環境オブジェクト – 電磁波伝播 – センサ」モデルに特徴づけられた仮想空間での検証プラットフォームを構築し、幅広い環境シナリオ下での自動運転の精確かつ効率的な安全保証を可能にすることを目指しています。DIVPでは安全性評価に対して、3つのテーマを軸とし、活動を推進しています。
(1)環境・空間描画・センサモデルを用いたツールチェーンへの拡張
(2)評価指標・体系の確立
(3)センサ弱点事象の特定と事象の拡張
このレポートでは、テーマ(3)センサ弱点事象の特定と事象の拡張 の取組をご紹介します。
背景・目的
センサ弱点事象の特定と事象の拡張において、多様な事業者が有するFOT (Field Operational Test)データの活用効率化が必要です。また分析したAD安全性評価指標・評価結果に基づいてシナリオを生成し、効率的にシミュレーションを実行する評価する仕組みが必須になります。
国際標準化活動の重要性
テーマ(3)では、シナリオや環境3Dモデル作成の効率化、さらにデータ連携における国際標準化活動を進めています。DIVPでは、つながるシミュレータとして、積極的に標準規格をインターフェースに取り入れております。
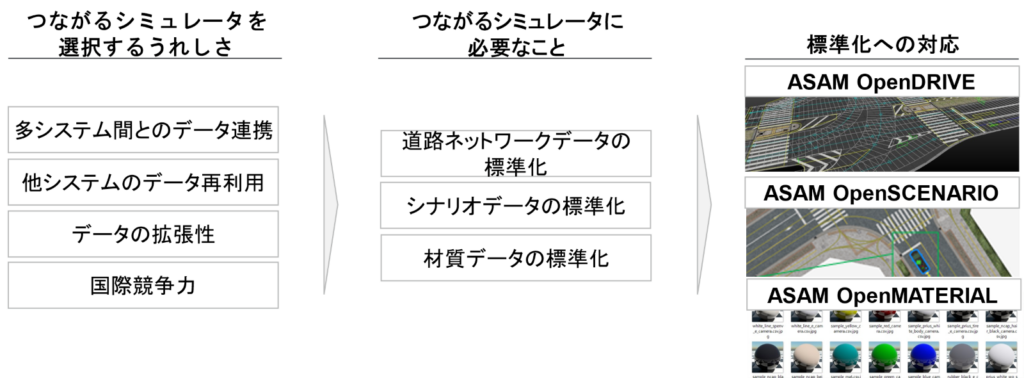
つながるシミュレータとして重要な要素は、多システム間とのデータ連携、他システムのデータ再利用、データの拡張性、そして国際競争力です。これらを実現するためには、標準化と規格化が重要となります。
テーマ(3)では、ASAM OpenDRIVEとASAM OpenSCENARIOという国際標準規格を採用しており、現在はASAM OpenMATERIALの標準化の策定作業を行っております。
各種フォーマットの機能
ASAM OpenDRIVE
ASAM OpenDRIVEは、道路ネットワークを表現するための一つのフォーマットで、これにより異なるアプリケーション間でデータを共有し、利用することが可能になります。


OpenDRIVEの道路は主に、「基準線」「レーン」「標識・信号・地物」で構成され、これらの要素を詳細に定義できます。基準線は道路の中心線を示し、レーンは車線の配置と属性を表現します。標識・信号・地物は道路上の交通標識や信号機、その他の物理的なオブジェクトを含みます。これにより、リアルな道路環境をデジタルで再現し、異なるシミュレーションやアプリケーション間でのデータ共有が容易になります。
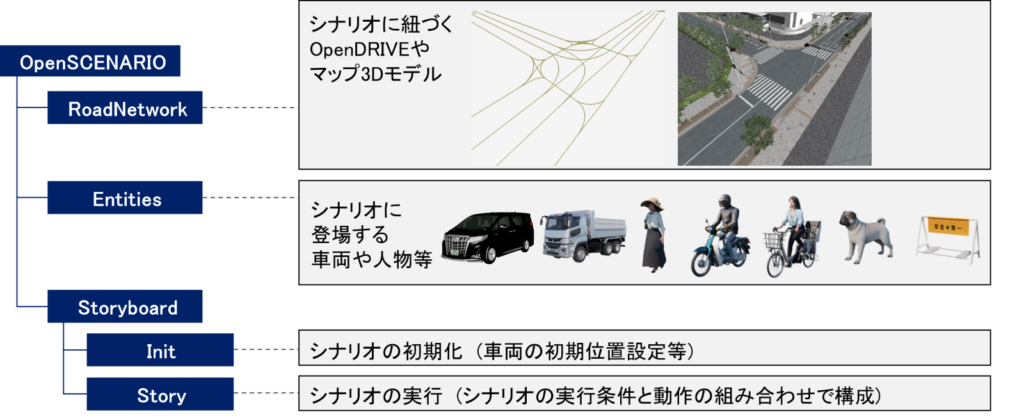
ASAM OpenSCENARIO
ASAM OpenSCENARIOは、自動運転システムシミュレーションのための標準的なシナリオ記述規格です。複雑な交通状況を詳細に記述することが可能で、このシナリオを活用して、シミュレータで様々な状況を評価することができます。また、ASAM OpenSCENARIOはXMLベースのフォーマットを採用しており、人間が読み書きしやすいだけでなく、機械が解析しやすいという特性も持っています。これにより、シナリオの作成や編集、共有が容易になります。
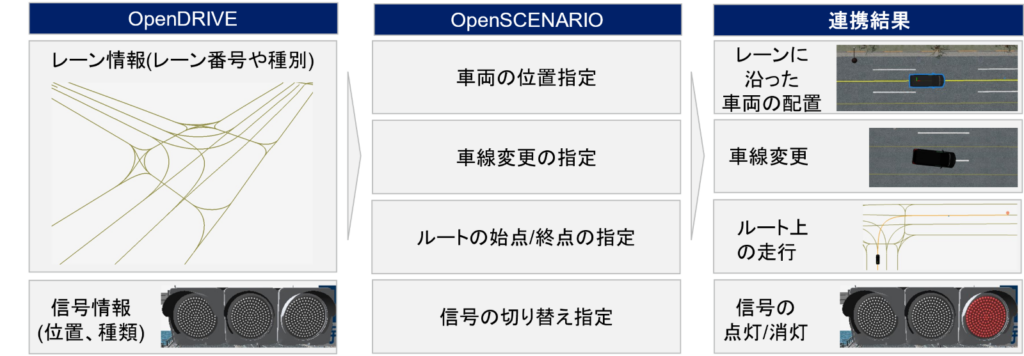
さらに、ASAM OpenSCENARIOはASAM OpenDRIVEと連携することが可能で、これにより道路ネットワークの詳細な情報を利用し、よりリアルなシミュレーションを行うことができます。これらの特性が自動運転システムの開発と評価において非常に有用な規格となっています。
今後の動向
複雑な道路の構築や、その上でのシナリオ作成は手間がかかるため、専用ツールを用いて編集作業を行います。DIVPでは、ASAM OpenDRIVEを用いた道路やその他の環境モデルの作成、そしてASAM OpenSCENARIOによるシナリオ作成をグラフィカルユーザーインターフェース(GUI)を持つソフトウェアを通じて、より効率的に行えるように機能の更新を進めています。

シミュレータの利点の一つは、実際の車両テストと比較して試験コストが低く、「つながるシミュレータ」を導入することで、さらにコスト削減も可能になります。そのためには、データの標準化が重要であるため、DIVPは今後も国際標準の規格導入を継続し、開発を進める予定です。
-
当社は、フライトシミュレータと航法装置の設計・製造会社として1962年に発足。現在では、シミュレーションシステム、航空・宇宙機器、パーキングシステムの3事業を中心に社会に貢献。
入社してから主にコンピュータグラフィックスにおけるアセットの作成から制御、表示などの研究に従事しております。当社の得意なアセットやツール開発にてDIVP®プロジェクトの研究を下支えしております。
この記事をシェアする
SNS
DIVP技術セミナーの詳細や今後のイベント等をSNSで投稿予定です。
カテゴリー
タグ一覧
Latest report
-
 2026 6 25
2026 6 252025年度 研究成果報告
-
2026 1 9
2024年度 研究成果報告
-
 2025 12 24
2025 12 24ADS Safety assurance Breakout Workshop 2025