Driving Intelligence Validation Platform
INTRODUCTION
This part describes the development of the “Driving Intelligence Validation Platform (DIVP®)” project, which has been funded by Strategic Innovation Program (SIP) Phase 2: Automated Driving (System and Service Expansion). And the development status of the project will be introduced.
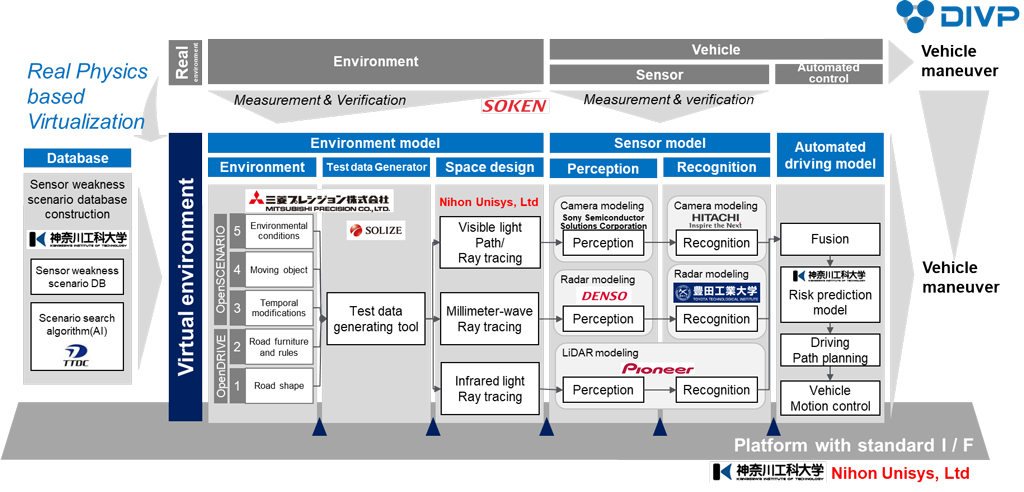
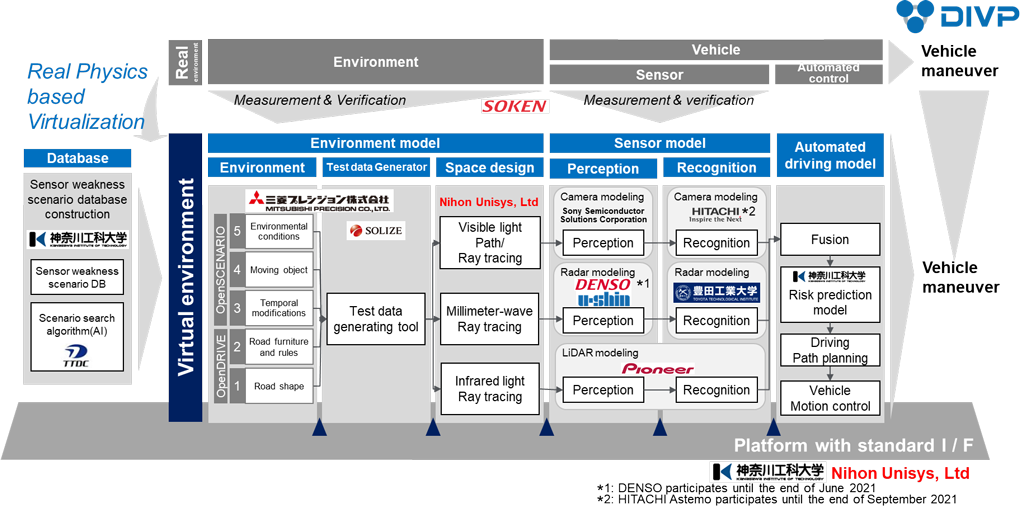
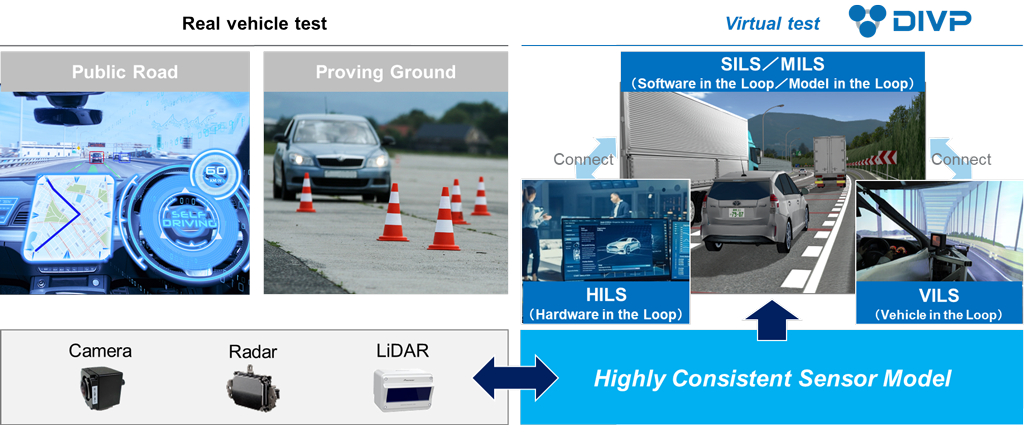
The current reliability and safety validation of automated driving vehicles relies on the actual driving performance validation, which requires a huge amount of resources (human resource, materials, cost, and time). In addition, it is difficult to verify the physical limitation of sensors as environmental monitoring functionality, such as cameras, radars, and Lidars, which deal with the driving environment of the real world, and it is difficult to say to what extent safety can be guaranteed (How safe is safe enough?). Based on the above background, in this DIVP® project, we are constructing a validation platform in a virtual space characterized by a series of “driving environment objects – electromagnetic wave propagations – sensors” models that are highly consistent with real phenomena. This is intended to enable precise and efficient safety assurance for automated driving under a wide range of environmental scenarios (Fig. 1).
The DIVP® consortium is established by 12 organizations from industry and academia, including sensor manufacturers, software companies, and universities (Fig.2). In addition, DIVP® is collaborating with the SAKURA project promoted by JAMA and JARI to develop a safety validation environment for automated driving and to contribute to global standardization.